Sonar Sensor Bot
|
Engineering Design Questions
|
Robot stops 1 cm before the box. |
1. State the assignment (problem/project) in your own words.
We had to structure a robot that could sense a box in front of it and come to a stop. Using a ultrasonic sensor from our lego kit, we did this easily.
2. What are your input factors? (What do you need to know or do before you can begin?) Include the research you did.
We needed to know how to construct a robot that could drive straight, and also how to position the sensor at the correct height. We researched how the Ultrasonic sensor worked to understand our objective better.
3. Describe the process in detail. Explain the steps you followed in order to complete the project.
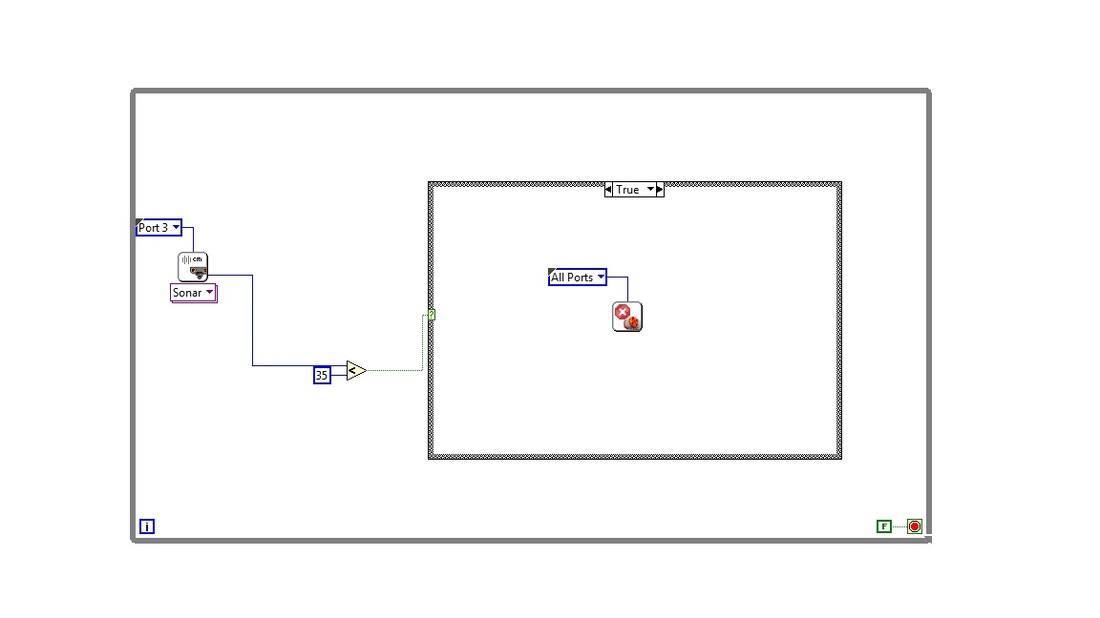
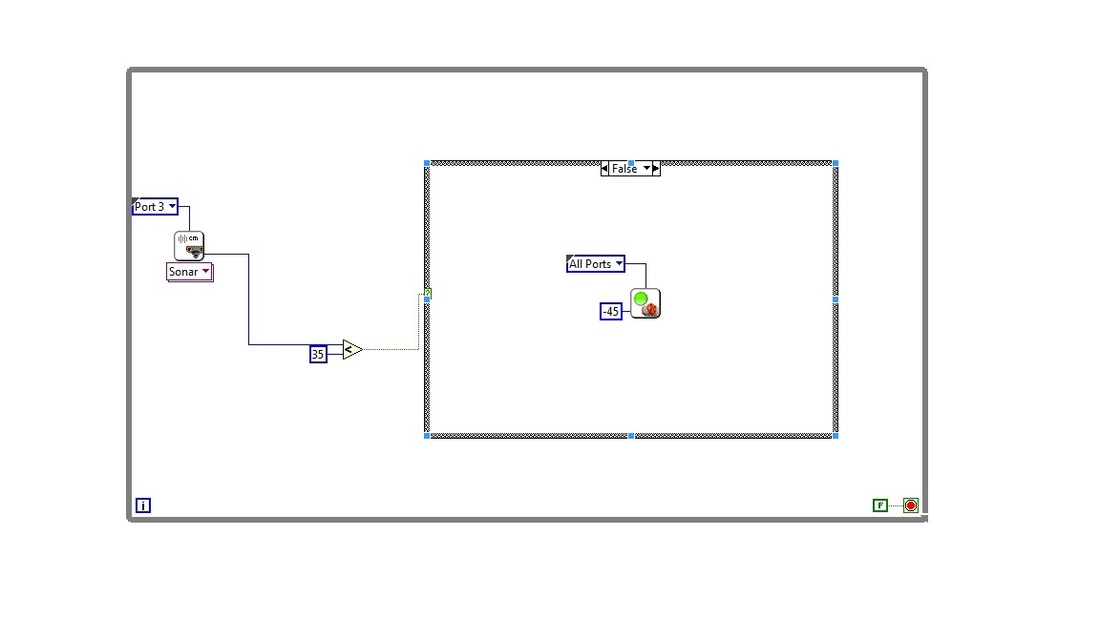
First, we built the robot. We used three motors, with tires on each motor. The robot drove straight. We then used lego pieces to position the ultrasonic sensor. After the robot looked like it would be successful, we programmed it. After creating a successful program, we loaded it onto the robot.
4. Describe the final output / product in detail: (what are we looking at?)
A functioning robot with an ultrasonic sensor used to stop the robot when obstacles are blocking its path.
5. Describe feedback you received during the project (suggestions, comments, etc). From peers, instructor etc.. How did you use this feedback to correct issues with your project?
Mr. Croke helped us program the robot and showed us how to use a case structure.
6. What did you learn during the assignment such as tools, skills, design concepts, software, hardware, etc ? ,
We learned how to equip an ultrasonic sensor and program it, as well as how to use a case structure.
7. If you were to do the project again, what would you do differently and why?
Describe one challenge in building and programming the robot.
I wouldn't change anything about our design process because we got it on the first try. One challenge was programming the sensor.
We had to structure a robot that could sense a box in front of it and come to a stop. Using a ultrasonic sensor from our lego kit, we did this easily.
2. What are your input factors? (What do you need to know or do before you can begin?) Include the research you did.
We needed to know how to construct a robot that could drive straight, and also how to position the sensor at the correct height. We researched how the Ultrasonic sensor worked to understand our objective better.
3. Describe the process in detail. Explain the steps you followed in order to complete the project.
First, we built the robot. We used three motors, with tires on each motor. The robot drove straight. We then used lego pieces to position the ultrasonic sensor. After the robot looked like it would be successful, we programmed it. After creating a successful program, we loaded it onto the robot.
4. Describe the final output / product in detail: (what are we looking at?)
A functioning robot with an ultrasonic sensor used to stop the robot when obstacles are blocking its path.
5. Describe feedback you received during the project (suggestions, comments, etc). From peers, instructor etc.. How did you use this feedback to correct issues with your project?
Mr. Croke helped us program the robot and showed us how to use a case structure.
6. What did you learn during the assignment such as tools, skills, design concepts, software, hardware, etc ? ,
We learned how to equip an ultrasonic sensor and program it, as well as how to use a case structure.
7. If you were to do the project again, what would you do differently and why?
Describe one challenge in building and programming the robot.
I wouldn't change anything about our design process because we got it on the first try. One challenge was programming the sensor.